刘治沼,李 琳,乔田田,李江荣*,何远洋
(1. 西北大学数学学院,陕西西安 710127;
2. 延安大学数学与计算机科学学院,陕西延安 716000)
近年来,T-S 模糊模型被认为是研究复杂非线性系统最有效的控制方法之一[1],大量研究成果已被应用到许多领域,相应的模糊控制理论分析与综合也引起了广大学者的兴趣,得到了一系列的研究成果[2-6]。
T-S 模糊双线性系统是一类特殊的非线性系统,能优于T-S 模糊线性系统对带有状态和输入耦合项的非线性系统进行建模。LI 等给出了T-S 模糊双线性系统的状态反馈控制器的设计方法和不确定T-S 模糊双线性系统的鲁棒H 稳定条件[7-8]。文献[9-10]分别研究了模糊双线性大系统的广义H2稳定问题和模糊双线性随机系统的静态输出反馈控制器的设计问题。
众所周知,非线性系统中普遍含有不确定性参数或隶属度函数是不确定的,对于这样的系统往往是无法建立T-S模糊模型的或者建立的T-S模糊模型也是有很强的保守性。区间Ⅱ模糊模型通过改进T-S 模糊模型,利用隶属度函数的下界函数和上界函数来合理的表示和处理系统的不确定性,从而为控制非线性系统给出了新的模型和方法[11]。因此,区间Ⅱ型模糊控制系统已被证明有更广泛的应用范围,引起了许多研究者的关注,得到了一系列的研究成果,其中文献[12]研究了区间Ⅱ型模糊系统的H 然观测器的设计,文献[13]研究了带有混合时滞的区间Ⅱ型模糊奇异系统的耗散滤波问题。然而以上研究成果都是基于区间Ⅱ型模糊线性系统的,针对区间Ⅱ模糊双线性系统的研究成果相对较少。
事件驱动控制是一种有效且合理的控制机制,又称为非周期性控制或异步控制,是一种能够在确保控制品质的前提下有效降低过程控制单元运算和通信负荷的控制方法。它的信号采样和控制器运算是由一个特定的事件进行驱动,而不是随时间的流逝而规律运动[5]。
根据以上的讨论,本文将研究离散时间区间Ⅱ型模糊双线性系统的事件驱动控制问题,基于李雅普诺夫稳定性理论,通过设计状态反馈控制器,得到闭环系统渐近稳定性条件。最后,通过数值例子验证所得结果的正确性。
1.1 系统描述
考虑一类复杂的非线性系统,基于区间Ⅱ型模糊双线性系统的模型为

1.2 事件驱动控制
根据文献[5],假设事件驱动的最近的一个输出量是xtk,下一个传输瞬间为

1.3 控制器设计

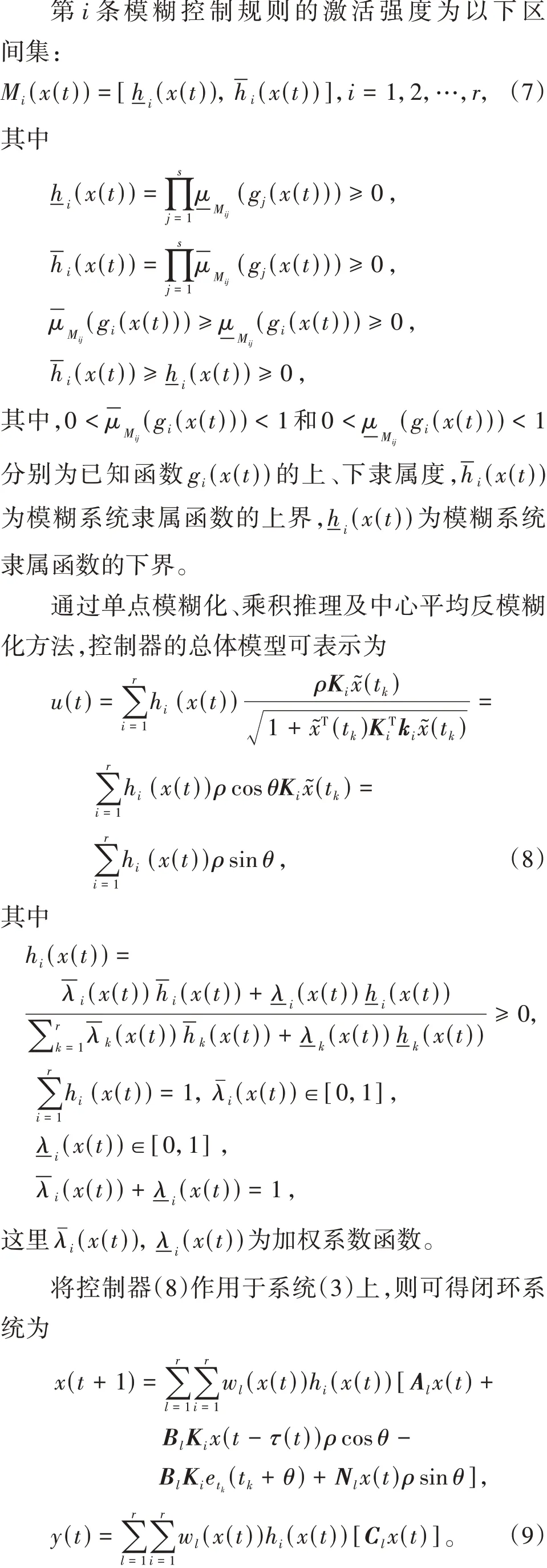
为了方便书写计算,将(9)式简写为如下形式:
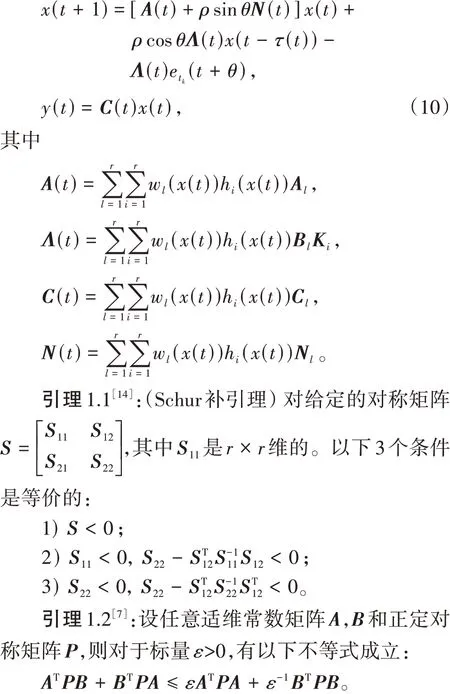
下面给出离散时间区间Ⅱ型模糊双线性系统(3)基于控制器(8)的稳定性条件。
定理2.1 对于给定的常数ρ > 0,ε1> 0,δ > 0,如果两个隶属函数满足(hl- mlwl)> 0且存在正定对称 矩 阵P,Q1,Q2,Q3,Ξ,控 制 器 增 益 矩 阵Kl(l =1,2,3,…)和矩阵Ωi(i = 1,2,3,…,r),X͂< 0 满足不等式(11)、(12)和(13),则闭环系统(10)是渐近稳定的。

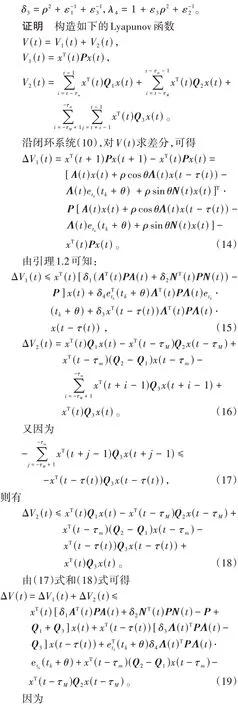

由(11)式、(12)式和(13)式,可知△V(t) < 0,因此由Lyapunov 稳定性理论可知闭环系统(10)是渐近稳定的。
注2.1 考虑到定理2.1 中含有的ΛT(t)PΛ(t)为双线性项,不能直接用LMI 工具箱直接求解[14],因此,给出以下定理。
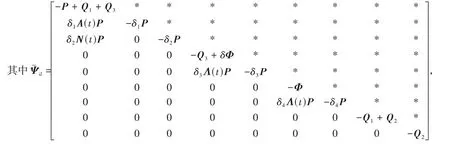
定理2.2 对于给定的 常数ρ > 0,ε1> 0,δ >0,δi> 0,i = 1,2,3,4,若两个隶属函数满足(hl-mlwl)> 0 且存在正定对称矩阵P,Z,Q1,Q2,Q3,Φ,控 制 器 增 益 矩 阵Kl(l = 1,2,…) 和 矩 阵(i =1,2,…,r),͂< 0 满 足 不 等 式(22)、(23)、(24)和(25),则闭环系统(10)是渐近稳定的。


“*”处元素是指矩阵中与之对称位置上元素的转置。


“*”处元素是指矩阵中与之对称位置上元素的转置。
注2.2 令Λ ={(P,Q1,Q2,Q3,Φ,Z,Kl)}满足(22)~(25)式并且为定理2.2 矩阵不等式的解,由于(25)式的限制可知Λ 不是凸集,不能用LMI 工具箱直接求解。一种被称为序列线性规划矩阵方法(SLPMM)被提出来解决这样的非凸可行性问题,它可以看作是锥互补线性化(CCL)算法的改进版本,SLPMM 算法和CCL 算法相比能产生使目标函数值严格递减的序列迭代,而且可以全局收敛。
首先,引入足够小的正标量v,并放松(24)式为

把(25)式放松为如下的半正定规划:

令ΛV={(P,Q1,Q2,Q3,Φ,Z,Kl)} 满 足(26)式 和(27)式,并且ΛV为闭集,则可利用SLPMM 算法进行求解,SLPMM算法的具体步骤可参考文献[7]。
为了进一步阐述上面的结论,证明定理的可解性,选取以下矩阵:

本文基于离散事件驱动控制,研究了区间Ⅱ型模糊双线性时滞系统的渐近稳定和状态反馈控制器的设计问题。通过设计李雅普诺夫泛函,并运用矩阵不等式方法,得到使闭环系统时滞依赖的渐近稳定充分性条件和控制器的设计方法。定理的结果可以利用SLPMM 求解。通过数值例子验证了所得结论的正确性。
猜你喜欢 闭环定理控制器 万亿赛道!从种养基地到餐桌,好润构建全产业链闭环“大棋局”,落下重要一子当代水产(2022年7期)2022-09-20J. Liouville定理中等数学(2022年6期)2022-08-29三转子式比例控制器设计与内泄漏分析舰船科学技术(2022年11期)2022-07-15南京溧水电子3款控制器产品中国自行车(2022年3期)2022-06-30大型军工企业集团重大风险全流程闭环管控方法探析军民两用技术与产品(2022年3期)2022-06-05时尚与数字共舞,打造印花供应链生态闭环纺织服装周刊(2022年16期)2022-05-11公平关切下闭环供应链差别定价决策物流科技(2022年2期)2022-05-07A Study on English listening status of students in vocational school校园英语·上旬(2019年6期)2019-10-09基于NFV的分布式SDN控制器节能机制网络空间安全(2019年8期)2019-03-18智能液位控制器在排水系统中的应用科技传播(2012年10期)2012-06-06