房远勇,吴 健,杨克辛,戴宜霖
(1.北京强度环境研究所,北京 100076;
2.北京航天计量测试技术研究所,北京 100076)
高冲击试验用于考核被测对象的动态指标,以获取考核被测对象在承受冲击时的结构强度。
目前,应用于高冲击试验的加速度传感器还是以压电式加速度计为主,压电式加速度计具有使用方便、灵敏度高、信噪比高、结构简单、重量轻、线性范围宽等优点,广泛应用于冲击和振动测量领域。
据统计,众多形式的测振传感器中,压电式约占80%。在以压电式加速度计为主的冲击加速度试验中,经常会出现加速度测试曲线在峰值加速度后存在零漂,即压电加速度传感器的输出随时间衰减后存在直流分量。
传感器这种零漂现象对传感器输出信号的冲击响应谱影响突出,产生零漂的试验数据在低频无法反应真实的振动状态,试验结果将不被采信,零漂现象的出现对试验高频测试结果也有一定影响,有必要对产生零漂的原因进行研究,并提出有效的解决手段。
冲击信号根据冲击形式的不同具有不同的信号特性,以试验为主的冲击有气炮冲击、霍普金生杆冲击、落槌冲击、摆锤冲击等,真实场景中的冲击类型有撞击、爆炸冲击、侵彻冲击、核爆冲击等。
各种冲击信号具有不同的特点,但幅值大、频率成分复杂、信号不确定性大是冲击信号的共同特征。
以某次爆炸冲击试验数据为例,如图1 所示,原始信号冲击最大值为32 560 g,冲击信号最大值出现在冲击高频部分,高频冲击量级大、能量小。用15 kHz 巴特沃斯低通滤波器对图1 中信号进行处理,通过低通滤波处理后,时域信号最大值变为16 670 g,15 kHz 以内有效信号最大值变为原始信号的1/2。
对原始信号进行频谱分析,获得的功率谱如图2 所示。
时域信号的功率主要集中在10 kHz以内,15 kHz ~30 kHz 内也集中了部分信号,但是能量聚集较小。

图1 爆炸冲击时域信号Fig.1 Time domain signal of explosion shock

图2 爆炸冲击功率谱Fig.2 Power spectrum of explosion shock
冲击信号低频段聚集能量大对结构破坏起关键作用,在考核冲击破坏的试验过程中,主要关注低频信号作用。
为了提高传感器对试验的适应性,对高频输入信号进行抑制,避免高频信号对传感器输出产生影响,具有现实意义。
压电传感器是基于正压电效应为敏感原理的一类传感器,压电晶体输出电荷与压电晶体所受的力成正比关系。
当与传感器安装谐振频率相同信号,或相近振动信号作用于传感器时,通过传感器理论安装频响曲线可知,传感器输出信号幅值将被放大,如图3 所示。
其中,ω为幅值偏差为5%时的对应角频率,ω为幅值偏差为10%时的对应角频率,ω为传感器谐振时对应的角频率。
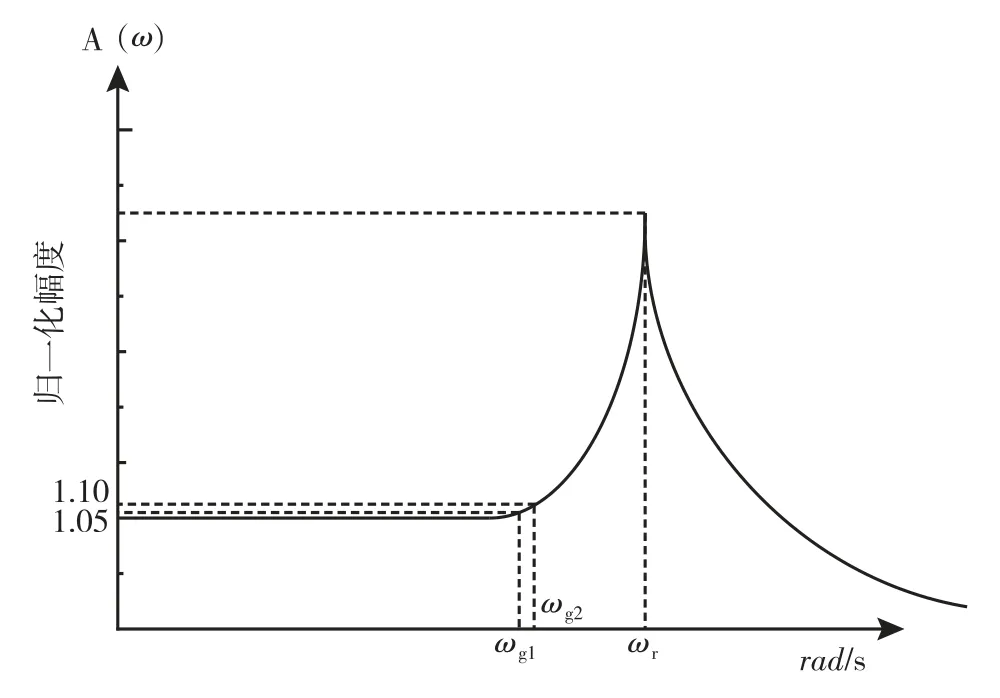
图3 传感器理论安装频响曲线Fig.3 Theoretical frequency response curve of sensor
冲击传感器对冲击进行测量时,把冲击振动衰减时传感器输出基线不在零位的现象,称为冲击传感器零漂。
导致压电冲击传感器产生零漂的因素很多,文献中大多从基座应变传感器变换电路等方面分析原因。
本文从传感器高频振动在传感器安装谐振频率处信号放大方向出发,分析传感器零漂原因,提出了产生零漂的新观点。
压电传感器与测量电路等效的电路系统简化后如图4 所示。

图4 传感器测量系统等效Fig.4 Sensor measurement system equivalence

当简化开路电压为U,微分方程的解为

其中,t 为衰减时间。
如图1 所示,爆炸冲击后,振动过程与多频率衰减正弦振动相似。
为了定量分析传感器与电路组成的测量系统导致基线漂移现象,对传感器感应单周期正弦信号进行简化,对产生零漂现象进行分析。
当正弦信号x(t)作为传感器激励,以单周期激励信号进行分析,则

其中,ω 为角频率。
压电传感器在简化的正弦激励作用下输出电压U

其中,加速度振动幅值为A 作用于压电传感器,传感器输出的电压变化为B。
B 除了与幅值A有关系以外,与传感器电荷灵敏度也相关,且B 与A呈线性关系。
微分方程解初始条件U (0 ) =0,t =0,按公式(4)计算,可以得出传感器与变换输出的电压信号显示表达式


基线偏移为-0.399 5 g。
基线偏移曲线如图5所示。

图5 基线偏移曲线Fig.5 Baseline offset curve
在传感器以及变换器参数一致的情况下,接近冲击传感器安装谐振频率处的幅值信号将被传感器结构放大,振动输出幅值呈指数增加效应,导致频率不变的情况下负向偏移加剧。
为了简化过程,冲击传感器受冲击作用后,可以简化为有阻尼自由衰减振动。
阻尼振动的阻力大小正比于速度v,即阻力f =-hv,其中,h 为传感器物理特性确定的常数,m 为传感器芯体质量。
阻力微分方程是

或




图6 正弦衰减曲线Fig.6 Attenuation sine curve
根据有阻尼自由衰减振动特点,结合加速度传感器等效测量系统输出偏移特性,振荡衰减正弦等同于多个正弦信号作用于RC 回路,单个周期正弦引起的输出偏移与下一个周期正弦作用于RC 回路基线偏移进行叠加,多次振动基线不回零导致偏移加剧,传感器出现零漂。
其中,零漂大小与振动幅值相关,传感器以及测量系统确定以后,冲击幅值成为零漂一个重要诱因。
在实际测试过程中,同一传感器在低量级时,基线几乎不出现零漂,高量级加速度冲击时,传感器输出零漂,而且量级越大零漂越明显。
通过分析可知,传感器感受到的高量级加速度一部分是真实的冲击加速度,另一部分是因为传感器安装谐振频率导致的冲击加速度放大。真实冲击加速度信号压电加速度传感器能够正常反应,对零点漂移贡献不大。
由于传感器安装谐振频率放大的冲击加速度信号,将被传感器结构指数级放大,导致基线零漂剧烈增大。
真实冲击加速度值无法改变,但传感器安装谐振频率处加速度放大作用可以通过特殊手段进行抑制。
传感器产生零漂主要原因是传感器承受了较大冲击加速度,这种加速度不仅取决于外部输入,与传感器自身结构也密切相关。
为了抑制传感器承受过大的冲击加速度,通过特殊途径对传感器结构进行优化设计,改善传感器自身性能,是一种行之有效的方法。
目前,有效解决传感器零漂的方法是隔离传感器的高频输入,常用的做法是在传感器内部或外部加装机械滤波器。
选择适当的材料安装在振动信号输入与传感器敏感元件之间,形成低通滤波器,滤波器的衰减应该到12 dB。
为了让滤波器有效滤波,-3 dB 的拐点频率应远低于加速度计共振频率,确保足够的衰减。
以6175 传感器内置机械滤波器为例,如图7 所示,传感器芯体采用特殊橡胶材料作为机械滤波器材料,顶部和底部均有机械滤波材料。
传感器内部结构使橡胶材料横向膨胀受到约束,提高了橡胶材料承压刚度,在受剪切载荷时仍然保持柔性。
橡胶材料需要通过外部结构施加预紧力,根据机械滤波器材料特性,其阻尼与刚度是一对矛盾量,需要将阻尼与刚度调整到合适的值才能获得最佳的滤波特性。
机械滤波器材料的力学参数特性复杂,在受力以后的力学特性更加难以确定。
采用性能测试方式对机械滤波器传递特性进行试验,最终完成机械滤波器定型设计。
滤波材料厚度与所受的加载力矩决定滤波材料的阻尼与刚度,滤波材料厚度与加载力矩作用后,传感器安装谐振频率变化如表1所示。

表1 机械滤波器作用后的谐振频率变化Tab.1 Change of resonant frequency after installation of mechanical filter

图7 机械滤波器结构Fig.7 Mechanical filter structure
通过表1 可知,垫片厚度增加会增加滤波器阻尼,表现为传感器安装谐振频率减小,提高加载力矩将提高机械滤波器刚度,表现为安装谐振频率增大。
2 mm 机械滤波器材料在加载9 N·m 以上力矩后刚度增加不明显,阻尼起到主导作用,传感器传递特性出现异常。
在试验过程中,用2 mm 厚度机械滤波器材料组装的传感器线性度达不到指标要求,主要现象是:当加速度量级达到一定量级后,传感器输出值不随输入信号变化而变化,不能满足使用要求。
通过试验对比,1 mm 机械滤波器材料加载力矩为10 N·m 滤波器达到较为理想状态,传感器幅值响应以及线性度都在可用范围内。
机械滤波器材料为1 mm 时,不同力矩下传感器安装谐振频率变化如图8 所示,随着力矩增大,滤波器阻尼减小,刚度增加,表现为频响曲线上安装谐振频率增大,谐振峰值增加。
安装机械滤波器的传感器谐振频率幅值比未安装机械滤波器的谐振频率幅值减小了1/2 以上,达到了降低传感器谐振峰值的作用,对传感器输出零漂起到缓解作用。传感器安装机械滤波器后,许用频段内幅值变化需要满足指标要求,许用频段内幅值变化不应超过5%。
以15 kHz 为传感器许用频段为例,对某一只6175 型冲击传感器进行试验,无机械滤波器传感器与安装机械滤波器传感器进行对比,在15 kHz 处幅偏差见表2。
通过表2 可以看出,1 mm 机械滤波器在加载力矩为10 N·m 能够得到较为理想的效果。

图8 力矩与频响变化关系Fig.8 Relationship between torque and frequency response
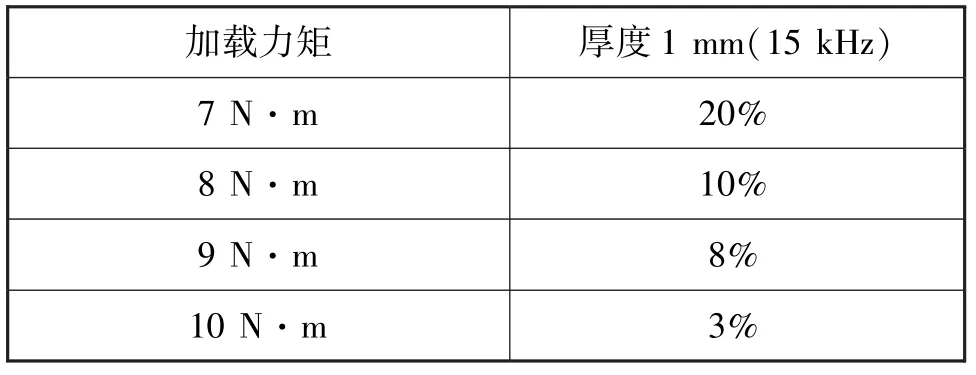
表2 机械滤波器作用后幅值变化Tab.2 Amplitude change after installation of mechanical filter
传感器安装机械滤波器以后,需要在许用频段内真实反应测量信号,为了测试机械滤波器的特性,对冲击传感器进行结构改造,如图9 所示。
改造传感器的目的是消除传感器底部螺栓安装对传递特性测量的影响。
激光测振仪直接测量传感器底座所感受的冲击信号,与作用到机械滤波器上的冲击信号为同一信号。
激光测量获得的冲击信号与传感器输出信号进行时域、频域对比,得出传感器传递特性。
时域信号对比能够反映出传感器对真实振动信号的响应能力,频域信号对比能够反映整个频段内传感器输入、输出特性。

图9 改造后的传感器Fig.9 Modified sensor
安装机械滤波器以后,激光输出幅值与传感器输出幅值基本一致,如图10 所示,能够反映真实振动状态。
传感器受自身结构限制,输出与激光测振信号之间存在一定滞后,表现为信号的相位差。
通过激光测振仪输出信号与传感器输出信号冲击响应谱对比可知,在10 kHz 频段范围内,传感器输出与激光测振仪输出高度重合,证明机械滤波器在10 kHz范围内对传感器输出无明显影响,如图11 所示。

图10 激光与传感器输出曲线局部Fig.10 Laser and sensor output curve
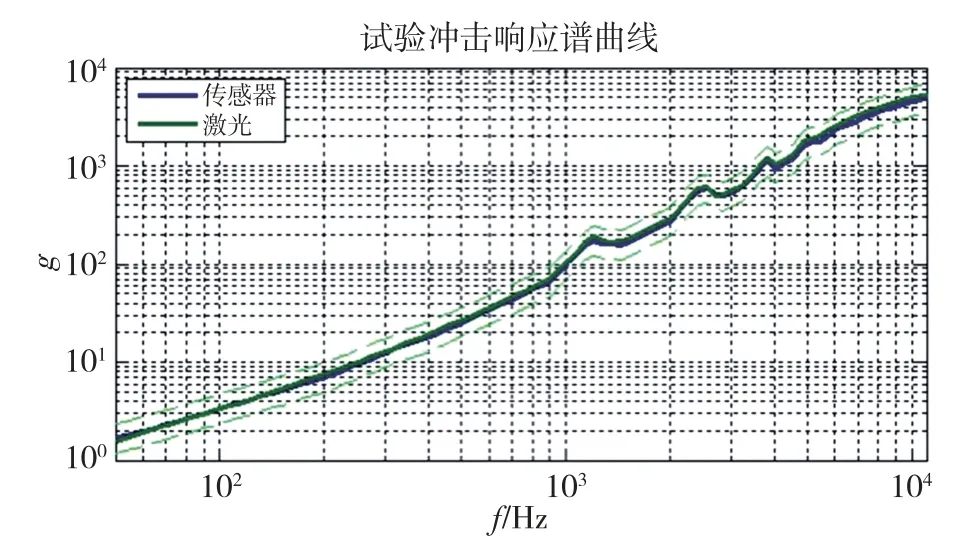
图11 激光与传感器输出冲击响应谱对比Fig.11 Comparison of output shock response between laser and sensor
机械滤波器能够改善传感器安装谐振频率处幅频特性,减小在安装谐振频率点附近传感器对输入信号的放大作用,能够在一定程度上抑制冲击传感器零漂。
以北京强度环境研究所研制的6175 传感器为例,对6175 传感器内置机械滤波器和不安装内部机械滤波器进行试验。
试验数据采样率为100 kHz,采集设备设置模拟滤波为30 kHz 的低通滤波器。
对时域信号进行15 kHz 低通滤波,获取传感器有用信号。
没有安装内部机械滤波器的6175 传感器在受到15 000 g 冲击时,时域信号开始出现零漂现象,如图12(a)所示;
内置机械滤波器作用后,6175 传感感器输出时域信号达到60 910 g,未出现明显零漂现象,如图12(b)所示,机械滤波器作用明显。

图12 6175 型冲击传感器对比试验结果Fig.12 Comparative test results of 6175 impact sensor
通过分析冲击时作用于传感器信号的特点以及冲击传感器输出信号的特点,结合传感器振动模型以及传感器与后端变换器组成的测量系统进行理论分析,获得的压电传感器测量系统具有负向漂移特性,在冲击信号频率接近传感器安装谐振频率时,传感器芯体感应振动加剧,零漂呈现出积累效应,最终表现为传感器输出零漂。
通过机械滤波器能有效抑制零漂,给出了一种机械滤波器结构,并对比了加装机械滤波器后的实际测试效果。
从高频振动的维度,对冲击传感器零漂产生的原因进行了阐述,对于分析冲击传感器零漂以及抑制零漂生成具有借鉴意义。
猜你喜欢 幅值谐振滤波器 浅谈有源滤波器分析及仿真客联(2022年4期)2022-07-06室温下7050铝合金循环变形研究装备维修技术(2022年7期)2022-07-01CIC插值滤波器的研究科学导报·学术(2020年43期)2020-10-29无需设置箝位开关的箝位谐振直流环节逆变器电机与控制学报(2018年9期)2018-05-14可靠性步进电机细分驱动技术研究中国新技术新产品(2018年22期)2018-01-05分析电路中谐振的原理与应用卷宗(2017年1期)2017-03-17平地机作业负载谱分析筑路机械与施工机械化(2016年12期)2017-01-13关于RLC串联谐振电路Q值的测量お中学物理·高中(2016年4期)2016-05-11FIR滤波器线性相位特性的研究智能计算机与应用(2016年1期)2016-03-02基于单片机的低频信号发生器设计现代电子技术(2014年16期)2014-08-20